Cine a inventat Robonaut?

Robonaut
Robonaut este un proiect de dezvoltare a unui robot umanoid condus de Laboratorul de Robotica Dextrous de la Centrul Spatial Johnson al NASA din Houston, Texas. Robonaut difera de alti roboti folositi in explorarea spatiului, in timp ce majoritatea sistemelor robotice spatiale (precum brate robotice, macarale si roboti de explorare) sunt proiectate pentru a muta obiecte mari, sarcinile Robonautului necesita mai multa dexteritate.
Ideea de baza din spatele seriei Robonaut este de a avea o masina umanoida care sa lucreze brat-la-brat cu astronautii. Factorul sau de forma si dexteritatea sasunt proiectate astfel ca Robonaut sa poata folosi uneltele spatiale si sa lucreze in medii asemanatoare cu cele ale astronautilor.
Istoria Robonaut
Munca la primul Robonaut a inceput in anul 1997. Ideea era sa construiasca un robot umanoid care putea sa asiste astronautii la sarcinile in care o pereche de maini ar fi foarte folositoare sau pentru a realiza diferite sarcini care sunt fie prea periculoase pentru membrii echipajului, fie prea banale pentru ca acestia sa isi piarda timpul cu ele. Acest sistem nu avea nevoie de unelte specializate ci pentru a fi capabile sa foloseasca aceleasi unelte ca si astronautii. Proiectul initial al Robonaut a fost pentru a fi folosit drept un capat efector al bratului robotic de pe Statia Spatiala Internationala, unde putea sa serveasca drept o alternativa la activitatea umana extravehiculara pentru mentenanta pe statie.

Robonaut 1 (R1)
Robonaut 1 (R1) a fost primul model. Cele doua versiuni Robonaut (R1A si R1B) au avut multi colaboratori inclusiv DARPA, dar niciunul dintre acestea nu au ajuns in spatiu. Alte proiecte pentru Robonaut propuneau folosirea teloperarii pe suprafetele planetare, unde Robonaut putea explora o suprafata planetara in timp ce primeau instructiuni de la astronautii aflati pe orbita. Robonaut B a fost introdus in anul 2002, R1B fiind o versiune portabila a versiunii R1.
In anul 2006 compania de automotive “General Motors” si-a exprimat interesul in proiect si a propus sa se alature echipei NASA. Anul urmator a fost semnat un Act de Acord Spatial care permitea ca General Motors si NASA sa lucreze impreuna la noua generatie Robonaut.
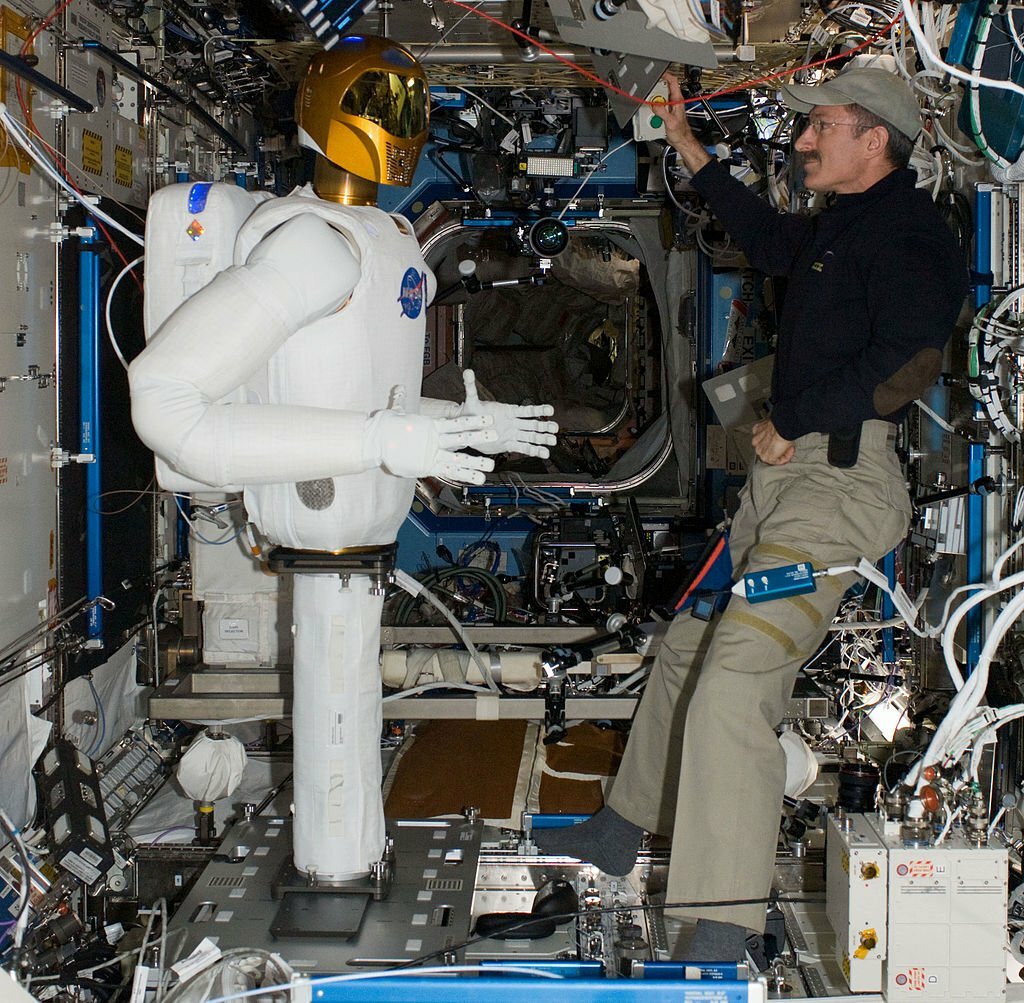
Robonaut 2 (R2) si Dan Burbank – sursa foto: wikipedia.org
In februarie 2010 Robonaut 2 (R2) a fost prezentat publicului. R2 este de patru ori mai rapid decat versiunea anterioara R1, este mai compact, cu o dexteritate mai mare si include o gama mai complexa si mai mare de senzori. Isi poate misca bratele pana la 2 m/s, are peste 350 de senzori si 38 de procesoare “PowerPC”.
Robonaut 2 a fost lansat pe data de 24 februarie 2011 si a fost trimis spre Statia Spatiala Internationala. Au fost adus mai multe imbunatatiri care au permis ca R2 sa poata lucra in exterior, in vidul spatial, unde poate ajuta cosmonautii la realizarea reparatiilor, pentru a adauga completari statiei spatiale sau pentru conducerea unor experimente stiintifice. Experienta NASA cu R2 pe statie ii va ajuta sa inteleaga capabilitatile sale pentru posibilele misiuni spatiale de amploare.
La sfarsitul anului 2009 o misiune numita “Proiectul M” a fost anuntata de Centrul Spatial Johnson care, daca ar fi fost aprobata, ar fi avut obiectivul de a trimite un robot R2 pe Luna intr-un termen de 1000 de zile.
NASA afirma ca robotii sunt esentiali pentru viitorul agentiei, iar R2 va furniza date de performanta despre cum poate lucra un robot brat-la-brat cu astronautii.
In continuare va invitam sa urmariti un filmulet (de aprox. 6 min. ) despre Robonaut:
Acum ati aflat cine a inventat Robonaut si care este povestea acestui “robot astronaut”. Speram ca acest articol vi-a satisfacut dorinta de cunoastere si vi-a imbogatit cunostintele.
Related Posts